| 基于专利分析的市政用机器人发展态势研究 | |
|
|
|
|
发布时间:
2019-12-20
浏览次数: loading
来源:
|
|
|
摘要: 市政用机器人是服务机器人中的一个重要分支,具有广阔的发展前景。采用专利分析方法,从发展趋势、重点技术领域、区域分布、优势机构、国内发展情况等方面开展市政用机器人发展态势研究,为相关政府部门、企业和高校院所进一步发展市政用机器人产业和技术提供情报支撑。研究结果表明: 市政用机器人技术正处于成长期,我国近年来对于市政用机器人技术的研发热情高涨,申请有大量相关专利,但从专利质量来看,技术水平还有待进一步提高。此外,提出了我国进一步发展市政用机器人产业的对策建议。 参考欧盟发布的地平线2020( Horizon 2020) 计划,市政用机器人是指提供市政服务的机器人,通常由区域机构、国家机构或参与公共工程的承建商操作,既可为城市基础设施、道路、下水道、公共建筑等的检修和维护提供支持,也可为执法和紧急服务提供帮助,按照具体应用场景可分为民用设施用机器人、救生和消防机器人、执法机器人和环境检测机器人[1]。这些机器人由受过训练的人员操作或监督,可以代替人类运行于对人类有风险的危险、污染或极端环境,因此发展市政用机器人具有重要的社会意义。 从市场来看,虽然相比个人/家庭服务机器人,市政用机器人市场容量较小,但有关数据显示,至2020 年,全球市政用机器人整体规模也有望达到数十亿美元。从政策来看,《机器人产业发展规划( 2016-2020 年) 》提出,围绕救援救灾、能源安全、公共安全等领域,培育特殊作业等方面的需求,并重点发展消防救援机器人等标志性产品。因此,从市场和政策来看,市政用机器人产业都具有良好的发展前景。 本文基于专利分析方法,从发展趋势、重点技术领域、区域分布、优势机构、国内发展情况等方面开展市政用机器人发展态势研究,为相关政府部门、企业和高校院所进一步发展市政用机器人产业和技术提供情报支撑。 1 数据来源
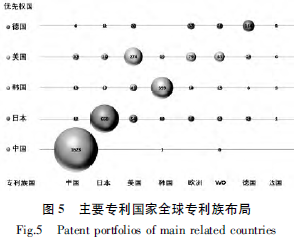
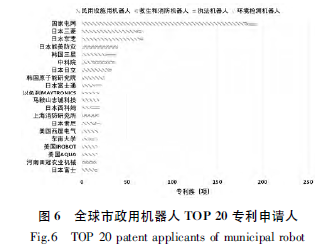
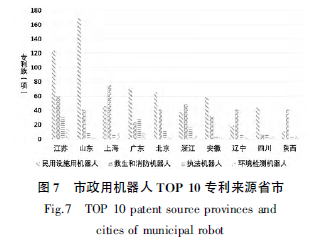
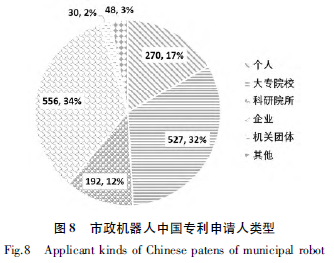
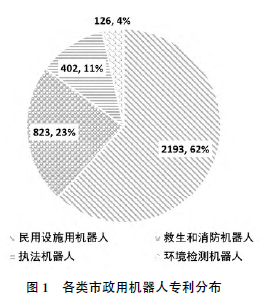
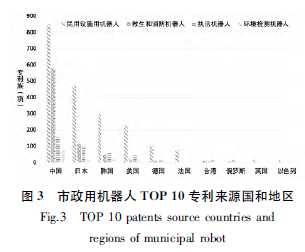
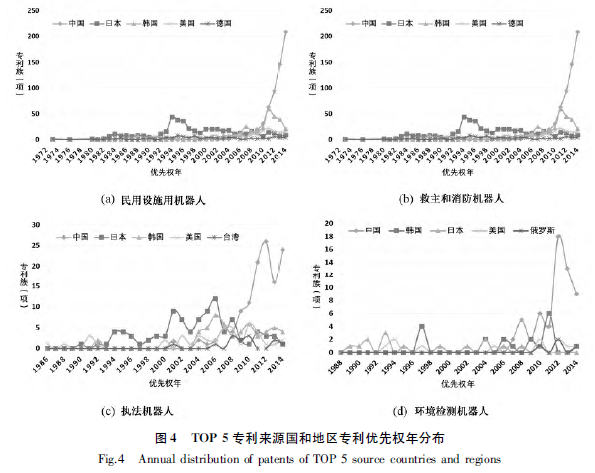
本研究采用德温特专利数据库,结合关键词、IPC 分类、德温特手工代码的方法进行专利检索和数据采集,共得到与市政用机器人技术相关的3454项专利族,6722 件专利( 检索时间范围为1962 年至2016 年5 月) 。专利分析工具上,综合应用了Thomson 公司的TDA、Thomson Innovation 以及国家知识产权局出版社专利分析软件PIAS 等工具。 2 全球市政用机器人发展态势 2. 1 专利申请基本状况 如图1 所示,3454 项市政用机器人相关专利中,民用设施用机器人专利达2193 项,占比62%,救生和消防机器人专利达823 项,占比23%,执法机器人专利达402 项,占比11%,环境检测机器人专利达126 项,占比4%。图2 展示了1973-2014 年市政用机器人相关专利数量的年度变化趋势。由于各类市政用机器人之间的相对弱相关性,该节将各类市政用机器人的专利变化趋势分开分析。 ( 1) 根据申请专利数量及发展趋势,可以将民用设施用机器人的技术发展分为3 个阶段[2-7]: 第1 阶段( 1973-1992 年) ,民用设施用机器人技术孕育期。该阶段申请专利数量少,每年专利申请量不超过22 项,而且专利增速较为缓慢,专利申请主要来自日本和美国,申请主力是日本东芝公司、日本三菱公司和美国西屋电气,专利技术主要集中在核反应堆的监视和测试、装卸核反应堆燃料或其他材料的设备、机械手及与其配合的附属装置。主要研究成果有: 美国Odetics Incorporated 公司研制的六足移动机器人,可在平面上自由移动,利用安装在其上的小型机械手,执行维修操作。西屋公司研制了可用于核电站蒸汽发生器的检修,可进行小尺寸的补漏,并对补漏效果进行测试的机器人,还研制了用于污染物清除的机器人。 第2 阶段( 1993-2004 年) ,民用设施用机器人技术成长期。该阶段专利申请数量开始明显上升,除日本和美国外,德国和韩国也积极开展民用设施用机器人方面的研究,进行相关专利申请,申请主力是日本三菱、日本东芝、日本日立。这一时期的技术热点集中机械手、机器人位置和姿态的控制、核反应堆的监视和测试、城市清洁机器人等方面。主要研究成果有: 日本早稻田大学1997 年开发了第一台用于核电站巡检的双足机器人样机。此外,日本还研制了核设备维护和检测的双臂机器人,通过远程操控可操作质量10 kg 的部件,还为国际热核聚变实验反应堆计划ITER 研制了毯式舱替换机器人。法国、德国研制了用于核反应堆检修的机器人和用于蒸汽发生器检修的机器人; 为开发能在强辐射环境下开展工作的机器人,美国能源部及宇航局NASA联合资助了代号为“先锋”的项目,所研制的机器人于1999 年5 月进入切尔诺贝利核电站封堆后的“石棺”。日本福岛核事故后,美国、瑞典等国的核电机器人先后进入现场,进行监测和清除工作。 第3 阶段( 2005 年至今) ,民用设施用机器人技术高速发展时期。专利申请数量飞速增长,其中中国专利申请量增长最为迅速,后期专利申请量已经超过日本和美国,这时期的申请主力是国家电网、韩国三星和韩国原子能研究院。这个时期的研究主要侧重于机械手、机器人位置和姿态的控制、缆索机器人、泊车机器人、泳池清洗机器人、建筑清洗机器人、装修机器人、城市清洁机器人等方面。主要成果有:iRobot 公司生产的4 台机器人Packbot 和Warrior。Packbot 主要用于检测和传送实时信息,包括温度、伽马射线强度、爆炸气体浓度及有毒化学物质的信息,即使完全淹没在水里也可以工作; Warrior 体形则大得多,不仅可携带68 kg 载荷,还可以用机械臂举起90 kg 重量; 2013 年,一台高40 cm、重20 kg 的爬缆索机器人在位于北仑的宁职院先进制造业研发中心亮相,它将代替人爬上杭州湾跨海大桥进行缆索检测工作; 2016 年,深圳怡丰机器人科技有限公司推出一款使用激光制导技术的停车机器人,该机器人能够360°移动,停一辆车耗时不到两分钟; 科沃斯在2016 Intersolar 光伏展上推出全新商用清洁机器人产品锐宝,能够自主实现吹、扫、吸同步完成,去除太阳能电池板表面99%积尘,有效提升电池板的光电转换效率。 ( 2) 根据申请专利数量及发展趋势,可以将救生和消防机器人的技术发展分为3 个阶段[8-11]: 第1 阶段( 1986-1994 年) ,救生和消防机器人技术孕育期。该阶段申请专利数量少,每年专利申请量不超过5 项,而且专利增速较为缓慢,专利申请主要来自日本和美国,申请主力是日本能美防灾株式会社,专利技术主要集中在灭火设备的控制、陆地灭火车辆和机械手等。主要研究成果有: 1986 年,日本东京消防厅首次在灭火中采用“彩虹5 号”机器人。 第 2 阶段( 1995-2006 年) ,救生和消防机器人技术成长期。该阶段专利申请数量开始明显上升,除日本和美国外,中国和德国也积极开展救生和消防机器人方面的研究,进行相关专利申请,不过申请主力仍是日本能美防灾株式会社。这一时期的技术热点集中在陆地灭火车辆、灭火物资的输送、机械手等方面。主要研究成果有: 2002 年6 月,由公安部上海消防研究所、上海交通大学、上海消防局三家单位共同承担的国家863 项目“履带式、轮式消防灭火机器人”研制成功并顺利通过国家验收。此后,全国多个省市陆续配备了这一款消防机器人。 第3 阶段( 2007 年至今) ,救生和消防机器人技术高速发展时期。专利申请数量飞速增长,其中中国专利申请量增长最为迅速,后期专利申请量已经超过日本,申请主力是中科院、河南田冠农业机械制造有限公司、公安部上海消防研究所。这个时期的研究主要侧重于陆地灭火车辆、灭火设备的控制、具有除车轮或履带以外的其他推进装置或接地装置为特征的车辆、履带车辆、灭火物资的输送、救生装备等方面。主要成果有: 2012 年,弗吉尼亚理工学院为美国海军设计了一款CHARLI - 2 消防机器人。这种机器人能够同人类士兵一起工作来扑灭海上战舰上的起火。这种消防机器人具备的能力包括使用消防软管、投掷灭火器手榴弹、攀爬梯子,而且当它在海军舰艇的甲板和走廊上行走的时候能够维持它的平衡; 日本佐贺公司研制出一种可以在废墟中爬行的小型机器人,它们可以承担营救被困于地震废墟中的幸存者的重任; 2011 年3 月21 日,三款“废墟搜索与辅助救援机器人”在中国科学院沈阳自动化研究所研究成功,并通过了中国地震应急搜救中心的测试。 ( 3) 根据申请专利数量及发展趋势,可以将执法机器人的技术发展分为2 个阶段[12-15]: 第1 阶段( 1973-2000 年) ,执法机器人技术孕育期。该阶段申请专利数量少,每年专利申请量不超过10 项,而且专利增速较为缓慢,专利申请主要来自日本,申请主力是日本Sanko、日立和韩国三星,专利技术主要集中在道路车辆的交通控制系统,夜盗、偷窃或入侵者报警器和机械手等。 第2 阶段( 2001-至今) ,执法机器人技术成长期。该阶段专利申请数量开始明显上升,除日本外,中国和韩国也积极开展执法机器人方面的研究,进行相关专利申请,申请主力是日本SECOM、国家电网、日本富士通等。这一时期的技术热点集中在夜盗、偷窃或入侵者报警器,机器人位置和姿态的控制,道路车辆的交通控制系统、机械手、将报警的位置情况发信号给中心台的报警系统等方面。主要研究成果有: 日本安保设备厂商SECOM 在2012 年12月26 日,SECOM 成立50 周年的大会上,公布了世界第一款民用保安自动飞行监视机器人。这款机器人可以对警戒范围内所遭受的入侵迅速作出反应,确定入侵人员以及车辆的特征。来自硅谷,成立于2013 年的初创团队Knightscope 用将近一年时间打造自动机器人K5,K5 可以利用大量的传感器收集实时数据。然后由Knightscope 通过一套预测性分析引擎进行分析,该引擎可以与现有的企业、政府和众包社交数据整合,判断特定区域是否存在潜在安全威胁; 在第十二届重庆高新技术成果交易会上,中国国防科学技术大学展示了中国首款智能安保服务机器人AnBot,AnBot 具有视频智能分析等先进技术,最大行进时速为每小时18 公里。如果有路人呼救,AnBot 可以迅速赶到现场,它甚至还能够自主寻找附近的充电桩进行自主充电。除了巡逻,AnBot还能承担防暴等任务。 ( 4) 根据申请专利数量及发展趋势,可以将环境检测机器人的技术发展分为2 个阶段[16, 17]: 第1 阶段( 1989-2007 年) ,环境检测机器人技术孕育期。该阶段申请专利数量少,每年专利申请量不超过5 项,而且专利增速较为缓慢,专利申请主要来自日本和韩国,申请主力是日本三菱和韩国SAMKYUNG,专利技术主要集中在水的研究或分析。 第2 阶段( 2008-至今) ,环境检测机器人技术成长期。该阶段专利申请数量开始明显上升,除日本和韩国外,中国也积极开展环境检测机器人方面的研究,进行相关专利申请,申请主力是河海大学、东南大学和韩国Convex。这一时期的技术热点集中在水的研究或分析、机器人位置和姿态的控制、适合于专门用途的船舶或类似的浮动结构等方面。主要研究成果有: 2012 年,扬州大学能动学院研制成功车型移动式环境监测机器人,该型机器人能够通过车载摄像头、超声波传感器及环境参数监测设备,回传现场视频影像、超声波雷达图像等信号,且能对目标环境进行温度、湿度、烟雾等参数采集。 2. 2 技术发展状况 为了全面了解市政用机器人技术发展,表1 列出了专利申请量前20 的主要技术分布( IPC 大组) ,可以看出,市政用机器人领域的专利技术主要集中在机械手、机器人位置和姿态的控制、消防机器人、核电机器人、城市清洁机器人、泊车机器人、缆索机器人等。 2. 3 专利区域分布状况 全球有数十个国家(地区)在市政用机器人领域进行了专利申请。如图3所示,专利申请排名前10位的国家和地区依次为: 中国、日本、韩国、美国、德国、法国、台湾、俄罗斯、英国和以色列。其中中国申请有专利1623 项,在民用设施用机器人、救生和消防机器人、执法机器人、环境检测机器人等分支领域均有布局,占市政用机器人专利总量的47. 0%,排名第1; 其次是日本申请专利666 项,占比19. 3%。韩国和美国各自申请专利401 项和291 项,分别排在第3、4 位。从市政用机器人发展历史来看,日美韩引领了市政用机器人领域的技术发展。中国在该领域属于后起之秀,虽然专利申请量远远领先于其他国家(地区),但研发与应用能力尚有差距。 图4 展示了民用设施用机器人、救生和消防机器人、执法机器人和环境检测机器人领域中TOP 5专利来源国和地区专利的年度分布情况。 在民用设施用机器人领域中,TOP 5 专利来源国分别是中国、日本、韩国、美国和德国。其中,德国率先申请了第一项民用设施用机器人相关专利,涉及道路标志用机器人,但显然日本针对民用设施用机器人的研发活动更为热门,从1992 年开始每年申请10 项以上的相关专利,申请峰值出现于1994 年,达44 项; 美国在该领域起步较早,但其研发活动直到2008 年以后才开始活跃,每年申请10 项及以上的专利,最高时达22 项; 韩国起步较晚,但从2006年开始每年专利申请量大幅度上升,峰值出现于2011 年,达59 项; 在TOP 5 专利来源国中,我国民用设施用机器人研发起步最晚,2000 年才有第一篇专利申请,但增长也最为迅速,于2014 年超越日本跃居第一,说明国内创新主体越来越重视民用设施用机器人的研发工作。 在救生和消防机器人领域中,TOP 5 专利来源国分别是中国、日本、韩国、美国和俄罗斯。其中,美国率先申请了第一项消防机器人相关专利,涉及陆用灭火车辆,但日本针对救生和消防机器人的研发活动更为热门,从1995 年到2005 年,出现多个活跃峰值,年专利申请量最高达17 项; 我国救生和消防机器人研发几乎和美日同时起步,1991 年就有第一项专利申请,由公安部上海消防研究所申请,关于消防机器人运载装置,但2008 年以前,国内对救生和消防机器人的研发投入还较少,每年专利申请量不足10 项,2008 年以后研发活动渐渐升温,2014 年专利申请量已达117 项,2015 年不完全数据也已达125 项,说明救生和消防机器人是当前的研发热点之一。 在执法机器人领域中,TOP 5 专利来源国和地区分别是中国、日本、韩国、美国和台湾。其中,美国率先申请了第一项执法机器人相关专利,涉及入侵检测用机器人系统,但日本对执法机器人的研发活动更为投入,从1990 年开始每年都会有相关专利申请,峰值出现于2006 年,达12 项; 我国执法机器人研发起步较晚,2004 年才有第一项专利申请,由华南理工大学申请,主题为保安巡逻机器人,2009 年后专利申请量开始稳步增长,2014 年专利申请量达24 项,2015 年不完全数据也已达32 项,说明我国创新主体越来越重视执法机器人的研发工作。 在环境检测机器人领域中,TOP 5 专利来源国分别是中国、韩国、日本、美国和俄罗斯。其中,日本在1989 年率先申请了第一项环境检测机器人相关专利,涉及水箱水质监测用机器人系统,但相对来说,虽然我国环境检测机器人研发起步较晚,2007年才有第一项专利申请( 由华南理工大学申请,主题为中央空调通风管道多功能空气质量分析机器人) ,但在环境检测机器人领域的研发热度显著高于其他国家,2009 年后专利申请量开始稳步增长,2012 年专利申请量出现峰值,达18 项,说明我国创新主体更为重视环境检测机器人的研发工作。 表2 综合反映了TOP 5 优先权国家的专利质量,中国专利量排名第一,但总被引次数、平均被引次数、专利被引率、被引H 指数、PCT 专利数量、美国专利数量等专利质量指标均明显落后于美国和日本,说明我国虽然相关专利数量多,但是专利质量较低,研发水平还有待进一步提高。 日本、韩国和美国作为市政用机器人技术研发的强国,其对世界市场的争夺也非常激烈,因此除了对本国进行专利保护外,为了在国外生产、销售市政用机器人,其必须在国外地区申请相关专利以求获得知识产权保护,同时该国同族专利的申请也可以反映出其市场战略。 图5 中可以了解到,日本除在本国申请外,同时重点在美国、欧洲、德国、中国和韩国等国家和地区进行布局,表明日本更为重视这些国家和地区的市场; 韩国除在本国申请外,同时重点在美国、日本、中国、欧洲等国家和地区进行布局; 美国虽然专利申请量相对较少,但布局力度却显著强于日本和韩国,除在本国申请外,同时重点在欧洲、日本、中国、德国和韩国等国家和地区进行布局。 我国作为市政用机器人领域专利申请量排名第一的大国,主要针对本国市场,只在韩国申请了1 件专利,申请了6 件PCT 专利,这说明国内创新主体的专利保护意识还不够强,而且值得向国外申请专利的真正有价值的技术少之又少,侧面印证了我国在市政用机器人领域核心技术的缺失。但是,其他国家在中国的专利布局还较弱,这是我国国产化市政用机器人的开发的有利条件之一。 2. 4 专利竞争机构分析 全球有2000 余家机构在市政用机器人相关领域进行了专利申请,排名前20 的机构主要来自中国、日本、韩国、以色列和美国,其中企业16 家,研究机构4 家( 图6) 。在TOP 20 机构中,日本领军企业数量遥遥领先,达8 家: 日本三菱( 第2) 、日本东芝( 第3) 、日本能美防灾( 第4) 、日本日立( 第7) 、日本富士通( 第9) 、日本西科姆( 第12) 、日本索尼( 第14) 、日本富士( 第20) 均为企业,其中,日本能美防灾专注于救生和消防机器人的研发,其他日本企业相对更为侧重民用设施用机器人和执法机器人的研发。来自韩国的2 家机构包括: 韩国三星( 第5) 、韩国原子能研究院( 第8) ,韩国三星侧重设施维护机器人、城市清洁机器人和执法机器人的研发; 来自美国的3 家机构包括: 美国西屋电气( 第15) 、美国IROBOT( 第17) 、美国AQUA( 第18) ,美国西屋电气专注核电机器人的研发,美国IROBOT 侧重城市清洁机器人和建筑监测机器人的研发,美国AQUA 侧重泳池或水槽清洗机器人的研发; 来自以色列的MAYTRONICS( 第10) 泳池清洗机器人的研发。来自中国的6 家机构包括: 国家电网( 第1) 、中科院( 第6) 、马鞍山志诚科技( 第11) 、上海消防研究所( 第13) 、东南大学( 第16) 、河南田冠农业机械( 第19) ,国家电网侧重变电站巡检机器人的研发,中科院四类市政用机器人均有布局,更为侧重救生和消防机器人的研发,马鞍山志诚科技侧重建筑施工机器人的研发,河南田冠农业机械侧重消防机器人的研发。 2. 5 国内专利申请情况 如图7 所示,市政用机器人领域,专利申请排名前十的省市依次是: 江苏、山东、上海、广东、北京、浙江、安徽、辽宁、四川和陕西。江苏在四类市政用机器人的专利布局上较为均衡,相对其他省市,从专利申请量来说,江苏在执法机器人和环境检测机器人领域具有优势,申请主力为东南大学( 16 项) 、苏州工业园区职业技术学院( 14 项) 和中国矿业大学( 9项) 等; 山东在民用设施用机器人领域具有优势,山东申请主力为山东国家电网( 110 项) ; 上海在救生和消防机器人领域具有优势,申请主力为公安部上海消防研究所( 19 项) 、上海大学( 16 项) 和上海芜津消防设备有限公司( 8 项) ; 广东申请主力为深圳怡丰自动化科技有限公司( 11 项) 、中国广核集团有限公司( 11 项) 和华南理工大学( 10 项) 等; 北京申请主力为北京国家电网( 45 项) 、北京中科院( 8项) 、北京信息科技大学( 7 项) 等。 如图8 所示,在1623 项中国专利( 中国为优先权国) 的申请人中,个人占17%,大专院所占32%,科研院所占12%,企业占34%,机关团体占2%,分布较为均衡,说明目前国内企业正在积极为市政用机器人的产业化作准备,同时高校院所等研究机构也在针对市政用机器人开展基础研究和应用研究工作。 3 结论 从以上分析结果可以看出,市政用机器人技术正处于成长期,专利申请量总体呈现快速增长态势。机械手、机器人位置和姿态的控制、消防机器人、核电机器人、城市清洁机器人、泊车机器人、缆索机器人等是该领域的研发重点。日美韩在市政用机器人领域具有很强的研究实力,引领了该领域的技术我国救生和消防机器人领域的研发工作几乎和美日同时起步,而在民用设施用机器人、执法机器人、环境检测机器人等领域的起步较晚,总体落后发达国家二三十年,但近年来我国在上述所有领域的专利申请量均出现快速增长,说明中国对于市政用机器人的研发热情高涨,正在积极进行技术研发和储备,为产业化作准备。但是,也应该看到,在该领域,中国专利质量远低于美国和日本,说明中国相关技术研发水平还有待进一步提高。同时,其他国家在中国的专利布局还较弱,这是我国国产化市政用机器人的开发的有利条件之一。 同时,市政用机器人具有良好的发展前景和重要的社会意义。因此,我国政府部门应该从以下方面入手,推进市政用机器人产业发展: ( 1) 加强统筹规划,突出政府引导和扶持。市政用机器人种类繁多,建议各省市统筹规划,根据已有基础和社会需求,选择优先发展种类。各级财政预算内安排一定的额度,专门用于市政用机器人技术创新和重大产业化项目的实施。加大市政用机器人研发、应用人才队伍的培养。建立市政用机器人产业园区试点,建设市政用机器人应用示范基地,推动市政用机器人在自然灾害、火灾、核事故、危险品爆炸现场、城市清洁、执法、安防场景中的示范应用。鼓励引导多种所有制企业进入市政用机器人领域,参与对市政用机器人技术的长效科研投入,进一步完善市政用机器人科研投资体系。 ( 2) 扶持核心技术研发,培育优势企业。在相关项目申报指南中设置市政用机器人专项,设立共性科研平台专项运行经费,引导高校、院所、企业共同攻关,加强对多自由度机械手、机器人位置和姿态的控制等核心技术的研发。大力培育优势企业,引导相关企业围绕细分市场向差异化方向( 如消防机器人、救援机器人、核电机器人、城市清洁机器人、泊车机器人、缆索机器人、执法机器人、环境监测机器人等) 。充分发挥龙头企业带动作用,以龙头企业为引领形成良好的产业生态环境。鼓励中科院、上海消防研究所、东南大学等在市政用机器人领域具有较强研发实力,并积累有大量有价值的科技成果的研究院所、大专院校与市政用机器人产业紧密结合,采取转让、许可或者作价投资等方式,向企业或者其他组织转移科技成果,促进科技成果转化、转移与产业化。 ( 3) 实施专利导航发展战略,为技术开发保驾护航。对有关国外公司如日本三菱、日本东芝、日本能美防灾、韩国三星等在世界各国,特别是在华专利申请情况进行分析研究,制定市政用机器人专利保护规划,在一些关键技术领域构建专利保护网。同时,建立市政用机器人实时更新失效专利数据库,并向社会公众免费开放,节约创新主体研发成本,为我国市政用机器人抢占国际市场竞争的制高点提供指导。 参考文献: [1] Robotics 2020 Multi-Annual Roadmap[EB/OL]. [2017-01- 06]. https: / /eu-robotics. net /sparc / /wp-content /uploads /2014 /05 / H2020-Robotics-Multi-Annual-Roadmap-ICT-2016.pdf [2] 杜树标,蒋韦韦,丁泮. 核环境机器人现状及关键技术分析[J]. 兵器装备工程学报,2016,37( 5) : 93-97+103. [3] 张义. 城市燃气管道检测机器人测控系统研究[D].北京: 北京石油化工学院,2015. [4] 唐路璐,王殿君,刘占民,等. 市政排水管道检测机器人系统设计[J]. 机械科学与技术,2013,32( 12) :1802-1806. [5] 徐文福,毛志刚. 核电站机器人研究现状与发展趋势[J]. 机器人,2011,33( 6) : 758-767. [6] 杨秀清,骆敏舟,梅涛. 核环境下的机器人研究现状与发展趋势[J]. 机器人技术与应用,2008,( 1) : 31-39. [7] 姜红娟. 城市主排水管道穿缆检测机器人结构及其运动特性的研究[D]. 哈尔滨: 哈尔滨工程大学,2006. [8] 王杨俭,陈炜,王立柱,等. 救援机器人双臂结构设计与运动学分析[J]. 制造业自动化,2017,39( 5) :89-93+101. [9] 葛世荣,朱华. 危险环境下救援机器人技术发展现状与趋势[J]. 煤炭科学技术,2017,45( 5) : 1-8+21. [10] 倪银堂,吕迪洋,王振豪. 消防机器人的研究现状综述与展望[J]. 自动化应用,2017,( 2) : 28-29. [11] 徐连伟,魏崇毓. 消防机器人行走控制系统的设计与实现[J]. 计算机测量与控制,2017,25( 1) : 66-69. [12] 李森,潘小琴,钦盼琛,等. 基于远程控制的双轮安防机器人系统设计[J]. 自动化与仪表,2017,32( 5) : 30-34. [13] 金小天. 智能机器人在环境监察执法中的应用[J].中国环境监察,2016,( 9) : 15-20. [14] 梅涛,陈剑,陈宏炬,等. 安防机器人关键技术与产业化前景[J]. 高科技与产业化,2016,( 5) : 51-55. [15] 方正. 两轮安防机器人控制系统设计与实现[D]. 成都: 电子科技大学,2016. [16] 胡刚毅,荣剑,岳晓光. 基于FPGA 的农林业环境监测机器人系统设计[J]. 农机化研究,2013,35( 7) :124-126. [17] 李晔,庞永杰,唐旭东. 一种智能水下机器人进行大范围海洋环境监测的方案与实验[J]. 热带海洋学报,2009,28( 4) : 12-16.__
(作者:谌凯,吴叶青* ,林志坚,吴巧玲,应向伟 作者单位:浙江省科技信息研究院)
|
![说明: C:\Users\Administrator\AppData\Roaming\Tencent\Users\377926\QQ\WinTemp\RichOle\%~{_00()6PB{27E4{S]QJV4.png](https://www.istiz.org.cn/upload/attached/image/20191220/20191220105912_2818.png)
![说明: C:\Users\Administrator\AppData\Roaming\Tencent\Users\377926\QQ\WinTemp\RichOle\JIYP[99JDWF1$VL8_]Q97@C.png](https://www.istiz.org.cn/upload/attached/image/20191220/20191220110003_5746.png)
![说明: C:\Users\Administrator\AppData\Roaming\Tencent\Users\377926\QQ\WinTemp\RichOle\ED)`S%]Y4X~`IR_$JDH]1ZQ.png](https://www.istiz.org.cn/upload/attached/image/20191220/20191220110100_7331.png)